发布日期:2021-2-20 来源:本站 返回列表
成果简介:
地下工程智能探测机器人瞄准地下工程领域智能建造与运维难题,实现了施工期、运营期巡检的快速化、无人化与智能化。机器人由智能行进系统、人机联动控制系统、实景重构系统、跳频通信系统、软件分析系统五部分构成。智能行进系统可根据危险区域位置智能调配机器人行进速度;人机联动控制系统可实现沉浸式远程控制;实景重构系统可进行场景的精确重建;跳频通信系统可实现1500m 范围远程传输;开发的隧道安全智能管理软件,具有模型重构、结构面识别、地质编录、块体识别、块体分析等功能。针对围岩块体识别需求,机器人首先构建围岩三维真彩模型,分析岩体结构面空间产状,实现三维块体的三维重构及定量评估,岩体结构面识别精度达亚毫米级。针对智能巡检需求,采用点云模型对比分析算法,满足超欠挖分析、变形监测、拱架检测等巡检功能需求,显著提高了巡检效率,保障了生命财产安全。以该机器人为基础,团队继续研发新一代地下工程智能巡检机器人,已在自动驾驶、5G 超远程通信与控制、地下空间高精度实时定位核心技术方面取得重要突破,旨在全面实现地下工程病害检测的高度智能化。
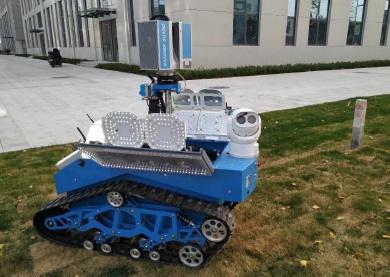
图1 地下工程智能探测机器人


图2机器人工程现场作业
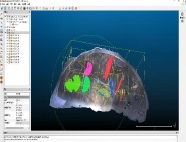
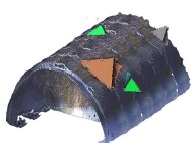
图3隧道安全智能管理软件145
获奖情况:
获得2019 年中国公路学会科学技术奖一等奖。
应用情况:该成果主要应用于地下工程领域。目前该成果已在京沪高速济南连接线隧道群工程、滨莱高速改扩建隧道群工程、济南地铁 R2 线等多个项目取得成功应用,解决了地下工程地质编录、渗漏水检测、围岩块体识别、衬砌开裂检测等工程问题,节约建设时间,降低灾害风险,节约建设成本超过 3 亿元。据统计,未来十年我国地下工程投资将超 8 万亿,地下工程安全管控方面具有近万亿规模的市场,本项目成果在交通、水利、矿山、市政等多个领域均有广阔的市场前景。

 |
 |
|
||||||



