一、所属领域
本发明属于颗粒体系力链识别技术领域,涉及一种三维颗粒体系中颗粒间接触力计算与力链的识别方法,利用XCT扫描颗粒体系对扫描得到的图像进行数字体相关运算,获得颗粒的三维位移和应变,计算获得颗粒间接触力。
二、技术或产品名称
一种三维颗粒体系中颗粒间接触力计算与力链的识别方法
三、技术水平
国内领先
四、技术简介
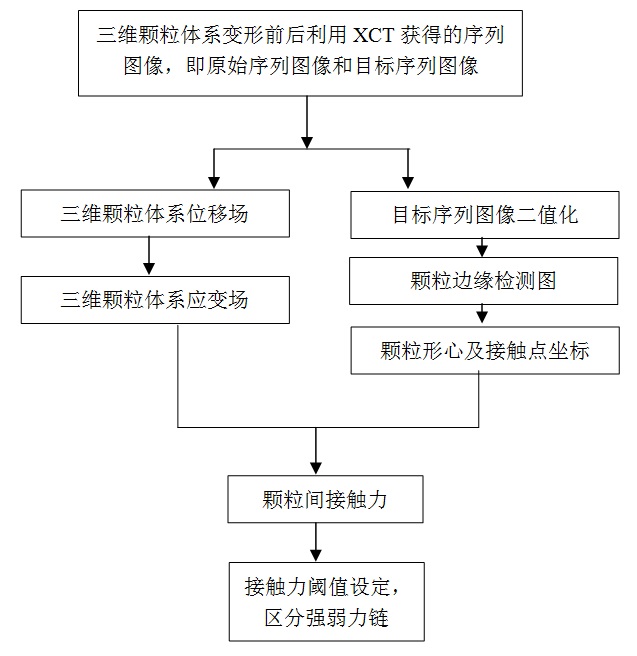
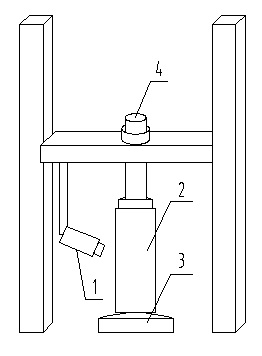
本发明属于颗粒体系力链识别技术领域,涉及一种三维颗粒体系中颗粒间接触力计算与力链的识别方法,将圆球放置于刚性容器中构成三维颗粒体系,利用加载压头对其进行加压并通过XCT扫描仪来采集原始序列图像和目标序列图像,利用数字体相关方法对采集的原始序列图像和目标序列图像分析来获得各点的应力,再对目标图像进行图像边缘检测,对颗粒形心进行识别,读取颗粒形心坐标和各颗粒的接触点位置坐标,根据每个颗粒平衡条件建立方程组,求解上述方程组,来获得每个颗粒上所有接触点处的接触力fi的大小以及方向;该方法原理简单,所需设备简单易得,使用方便灵活,测量结果准确,实用性强,应用环境友好,市场前景广阔。
五、创新点及性能指标
能够对真实的三维颗粒体系进行实验,利用XCT扫描获得序列图像,基于数字体相关方法颗粒三维位移场和应变场,获取变形信息和接触点位置。利用平衡条件获得颗粒接触点处接触力的大小与方向,并识别出各时刻力链网络,并区分强力链和弱力链。
六、知识产权情况
发明专利授权,专利号:ZL201710117330.2,专利名称:一种三维颗粒体系中颗粒间接触力计算与力链的识别方法
七、合作方式
技术许可
八、投资概算及经济效益分析
应用该专利实现仪器获软件的研发,有利于快速实现颗粒体系力链及参数的识别与提取,分析三维颗粒体系力链,研究颗粒体系稳定性分析。计划投资100万。实现计算软件的研发,生产出一套样机。
九、负责人
陈凡秀
十、技术或产品的关键词
颗粒体系,力链,识别,实验
十一、技术或产品介绍图片
图1.工作原理流程示意框图
图2.实验装置的主体结构原理示意图