研究内容
空间相贯曲线多坐标联动直接插补算法研究、相贯曲线自动焊接数控系统开发等工作。
研究成果
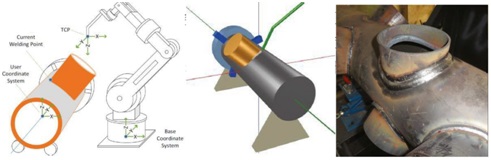
目前管-管正交相贯形成的相贯曲线的直接轨迹插补算法、插补速度稳定性控制等基础理论工作所取得的研究成果已经在国际期刊、国内期刊和国际会议上 发表论文 6 篇,其中 SCI 收录 1 篇,EI 收录 5 篇。针对相贯曲线自动焊接数控装 备技术,建立了焊接机器人与工件的模型。根据相交管道的几何模型及相贯处负 责模态,开发了电焊枪姿态及轨迹的控制策略。用齐次变换矩阵分析了焊缝特征 和焊枪姿态,得出了主管旋转角的变化规律及焊枪与世界坐标系的空间位置关系。利用 MATLAB和 DirectX 对相贯管道的几何模型和焊接过程的运动模型进行了 仿真。通过实验验证,该自动焊接可以用于主管旋转式相贯曲线自动焊接的实时 插补或离线编程。这些研究成果包括相贯曲线二、三、四坐标联动直接插补算法 及插补速度稳定性控制,为本课题的研究打下了坚实的前期工作基础。
相贯曲线焊接机器人轨迹自动生成